|
|
|


|
GISáček |
|
|
|
Zpracování a prezentace srážkových dat pomocí GIS systému GRASSJan Kohout AbstractPrecipitation data contain geographical information; an appropriate tool is needed for it to processed - geographical information system (GIS). The implemented application is composed to process and present these data Attention is focused on GIS capabilities in processing geographic information, space data administration and the ways of use of particular GIS GRASS. At the same time, an outline of methods to improve the quality of the resulting data by joining several techniques is put up. AbstraktSrážková data často obsahují geografickou informaci, která vyžaduje odpovídající nástroj na zpracování - geografický informační systém (GIS). Realizovaná aplikace je vytvořena pro prezentaci těchto dat. Pozornost je věnována schopnostem GISů při zpracování geografické informace, správě prostorových dat a schopnostem vybraného GISu GRASS. Současně je podán nástin postupů ke zlepšení kvality výsledných dat integrací různých technik měření. ÚvodFakta týkající se jednotlivých oblastí životního prostředí jsou základem nejen pro pochopení principů fungování životního prostředí, ale i pro aplikace adekvátních změn. Protože jde o velmi složitý systém, je pro jeho pochopení nutné porozumět jednotlivým složkám. U jevů v systému životního prostředí je nutné kromě odpovědi na otázku ``co se stalo'' vědět ``kde se to stalo''. Tento pohled rozšířený o identifikaci místa nám umožní nalézt souvislosti mezi jednotlivými ději a hledat jejich příčiny a důsledky. Tuto schopnost nám dávají Geografické informační systémy, které integrují prostorové i neprostorové informace do jednoho celku, se kterým dokáží efektivně manipulovat. Získávání hydrometeorologických datTématem této práce je zpracování údajů o srážkové činnosti. Problematika a metody této oblasti patří k netriviálním a důležitost tématu ukazují také nedávné povodně na našem území. Naměřená data jsou získávaná dvěma odlišnými způsoby - měřícími stanicemi a meteorologickým radarem. Protože další zpracování vstupních dat je výrazně determinováno jejich kvalitou a druhem, věnuji se těmto problémům podrobněji. Díky odlišným způsobům měření získáváme informace rozdílné strukturou i obsahem. Je proto třeba využít výhod a schopností, které nám dávají obě měřící metody, a co nejvíce omezit jejich negativní vlivy. Popisem kombinace dat naměřených měřícími metodami se věnuje poslední sekce této kapitoly. 1.1 Stručně o Českém hydrometeorologické ústavu (ČHMÚ)Český hydrometeorologický ústav (ČHMÚ http://www.chmi.cz/) vznikl za účelem získávání a vědeckého zpracovávání informací z oblastí meteorologie a klimatologie, hydrologie a ochrany životního prostředí. Za jednu z nejvýraznějších aktivit můžeme považovat předpovědi počasí, kterými se zabývá oddělení meteorologie a klimatologie. Pro tuto činnost získává informace o srážkové činnosti z měřících meteorologických stanic rozmístěných po celé republice a dále pak z radarové sítě - jde o radary umístěné ve Skalkách u Protivanova a v Brdech u Prahy. 1.2 Měřící meteorologické staniceHlavní náplní meteorologických stanic a observatoří je měření a pozorování stanovených meteorologických i jiných prvků, jejich primární zpracování a předávání centru ČHMÚ. Výsledky nepřetržitých měření a pozorování jsou předávány každou hodinu do centrálního telekomunikačního počítače. Zde jsou k dispozici především pro sestavení meteorologické předpovědi a jako zdroj aktuálních informací. Tento projekt zpracovává hodinové úhrny srážek. Použití této položky má výhodu v aktuálnosti měření a určité spojitosti výsledných dat. Nevýhodou je skutečnost, že obsahuje hodnoty jen z části měřících stanic. Případné využití tří- nebo šesti- hodinových úhrnů by znamenalo větší zastoupení měřících stanic, ale výsledné hodnoty by nestačily pro kvalitní zobrazení přechodů srážkové oblačnosti. 1.3 Metoda radarových odrazůMeteorologický radiolokátor slouží ke zjišťování výrazné srážkové oblačnosti (bouřky) do vzdálenosti přibližně 250 km; hodnoty naměřené radarem mohou být použity pro odhad okamžitých intenzit srážek do vzdálenosti přibližně 150 km od radaru. Vysílač radaru generuje vysokou frekvencí krátké elektromagnetické pulsy (stovky pulsů za sekundu, délka pulsu je řádu mikrosekund). Elektromagnetická energie je vysílána ve tvaru úzkého svazku do atmosféry, kde dochází k odrazu části energie. Cíle jsou jak meteorologické (srážkové částice), tak i nemeteorologické (letadla, terénní útvary). Část odražené energie je opět přijata anténou a detekována přijímačem radaru. Podle polohy antény a doby mezi vysláním signálu a jeho přijetím je určená vzdálenost a poloha cíle. Radarové odrazy jsou zobrazovány v barevné stupnici intenzit. Obvyklý interval měření je 5-15 minut. Horizontální rozlišení dat bývá 2×2 km, vertikální 1 km. Toto prostorové rozlišení je nutné, aby bylo možné zachytit jednotlivá srážková jádra přeháněk (tj. lokální maxima). V současnosti využívá ČHMÚ dvou radarů Brdy-Praha ve středních Čechách a Skalky u Protivanova na střední Moravě, které pokrývají celé území republiky - viz obrázek : Obrázek č. 1.1: Přehled dosahu meteorologických radarů 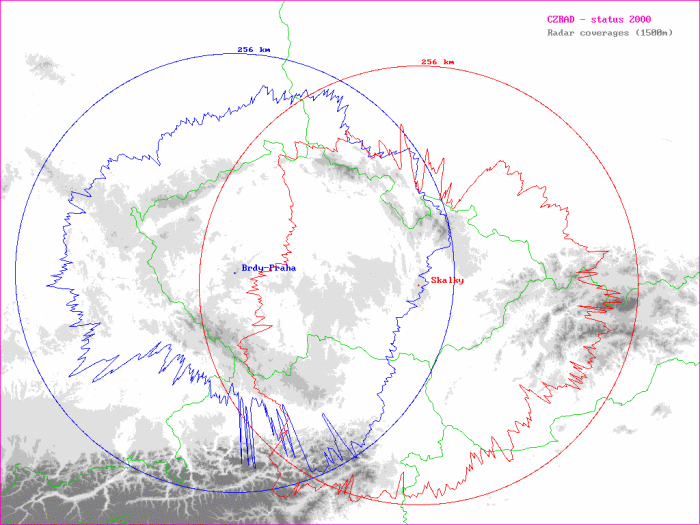
Z důvodu velké prostorové i časové proměnlivosti srážek je vhodné používat co nejkratší interval měření (5 minut a méně). Celkové chyby určování intenzit srážek pomocí radaru jsou řádu desítek až stovek procent, ale mohou být částečně sníženy vhodným zpracováním dat, například porovnáním s hodnotami srážek naměřených klasickými srážkoměrnými sítěmi. 1.4 Kombinace dat srážkoměrných sítí a radarových měřeníZ mnoha důvodů, z nichž některé byly již dříve uvedeny v 1.2 a 1.3, je nutné rozšířit stávající měřící metody o jejich kompozici. Pro vyšší názornost uvádím vzájemné porovnání aplikovaných metod.
1.4.1 Výhody a nevýhody jednotlivých měřících metodMezi výhody sítě měřících stanic patří schopnost pokrýt spojitou časovou oblast krátkých (minutových) srážek, které radar nemusí zachytit. Tato schopnost ovšem brání možnosti okamžitých měření. Navíc skutečnost, že srážková pole se mohou na vzdálenost stovek metrů lišit o několik řádu a existence lokálních extrémů rovněž ukazuje na další nevýhodu srážkových sítí - jejich hustota nikdy nemůže být dostatečná k tomu, aby zabránila chybám měření daným diskrétností měření v prostoru. Zjednodušeně řečeno - za kopcem už vůbec pršet nemusí, nebo tam může být krupobití. Radarová pozorování srážek mají oproti klasickým sítím srážkoměrů výhodu měření na velké ploše z jediného místa v téměř reálném čase. Radarová pozorování však ukazují pouze okamžitá rozložení intenzit srážek v diskrétních časech. Srážková pole mají přitom velkou proměnlivost i v čase, okamžité hodnoty se během 10 minut mohou lišit o několik řádů. Podobně jako u srážkoměrných sítí se nelze libovolně přibližovat plnému pokrytí, nelze z fyzikálních vlastností daného měřícího zařízení libovolně zkracovat dobu měření.
1.4.2 Chyby radarových měření a jejich důsledkyOdhad přízemních srážek pomocí měření odrazivosti radarem v malé výšce přináší některé nepřesnosti, které rostou se vzdáleností od radaru :
Aby bylo možné kvantitativně využívat radarová data pro hydrologické účely, je nutné zavést dostatečně účinné procedury eliminace nemeteorologických - především pozemních (hory, pohyb lesa ve větru) - radarových odrazů. Jednou z možností zvýšení přesnosti odhadu intenzit srážek je také kombinovat radarový odhad s pozemním měřením srážek Problém není ovšem pouze u měření pomocí metody radarových odrazů. Jak již bylo řečeno výše, použití měřících meteorologických stanic s sebou nese také některé chyby. Sebelepší interpolace hodnot stanic nemůže zahrnout skutečnost, že jde pouze o odhad velmi omezený hustotou stanic (v současné době přibližně desítky stanic pokrývajících území republiky při hodinových měřeních a stovku při 24-hodinovém měření). Tato hustota je stále menší než vzdálenost, ve které se může radikálně změnit počasí. Specifika prostředí poskytovaného GRASSem2.1 Pracovní prostředí GRASSuPracovní prostředí instance GRASSu se skládá ze čtyř komponent, z nichž první dvě (příkazový řádek a grafické rozhraní) se týkají rozhraní pro spouštění příkazů z interpretu GRASSu, třetí (grafický monitor) popisuje standartní grafickou prezentační vrstvu a poslední (externí rozhraní) vysvětluje vstupní rozhraní pro komunikaci s vnějšími programy :
RaMSES - analýza a návrhTato a následující kapitoly se věnují tvorbě výsledného geografického informačního systému RaMSES (Radar and Meteorological Stations Expert System). Omezíme se na zásadní body :
3.1 Návrh architekturyJako nejvýhodnější se z hlediska implementace i následné správy jeví třívrstvá architektura informačního systému. Ta je charakterizována rozdělením celého systému do těchto základních vrstev :
3.2 Funkční analýzaCílem je vytvořit aplikaci, která je snadno dále rozšiřitelná doplněním modulů z jiných oblastí environmentalistiky. Na tomto místě se omezíme pouze na základní kroky funkční analýzy ve schematické formě :
RaMSES - správa a zpracování datTato kapitola se zabývá uvedenými problémy, které můžeme souhrnně nazvat správa dat. Zde je uveden stručný popis těchto kroků spolu s popisem umístění :
4.1 Import dat
4.1.1 Data měřících stanicjsou ve formátu HTML stránky se seznamem údajů pro jednotlivé stanice. Tyto údaje jsou tvaru : <P><A NAME="93">11451 L1STAN01 201 266 362 56 1.2 0.6 1.4 1.8</A> Výsledným formátem je seznam bodových hodnot - sites data.
4.1.2 Data z radarových měřeníjsou ve formátu RPD ( RADAR PRIMARY DATA).
4.1.3 Jiné datové vstupyMimo tato data určená pro vlastní prezentaci hodnot jsou do systému importována data umožňující zlepšení přehlednosti prezentace nebo vložení pomocných informací pro výpočty s daty. Zde jde konkrétně o jednoduchou mapku hranic států dané oblasti.
4.1.3.1 Hranice státůVstupní formát souboru je rastrový, a data v něm jsou reprezentována binárním polem 0 a 1 o velikosti 512×512. Výsledná data jsou následně převedena do vektorového formátu. Druhým krokem zpracování souboru je jeho využití pro výpočty preferenčních oblastí. Vzhledem k různé kvalitě interpolací (4.2) v oblasti pokryté měřícími stanicemi a mimo ni a také vzhledem k podobným rozdílům mezi interpolacemi a radarovými snímky jsou ve výpočtech výsledných hodnot použity různé váhy vstupů. Tyto váhy se liší podle příslušnosti daného bodu vzhledem k oblasti pokryté měřícími stanicemi a tato oblast je definována jako plocha uvnitř hranice ČR. 4.2 Interpolace měřících stanicTato sekce popisuje metody, které umožňují převod z bodových dat (hodnoty z měřících stanic) do rastrových dat (plochy pokrytí). Jde o několik kvalitativních změn. První z nich je rozšíření a vylepšení stávajícího systému zobrazování srážek, protože k výsledkům z radarových měření doplní i další nezávislou měřící metodu. Srovnáním obou metod dosáhne jmenovaného cíle. Druhou změnou je významné doplnění způsobu zpracování meteorologických dat. Jde o použití existujících dat k vytvoření zcela nových dat. Z tohoto důvodu je zde této oblasti věnována větší pozornost.
4.2.1 Algoritmus Regular Spline with Tension (RST)Tento program je určen pro interpolaci hodnot z bodových do rastrových dat popisujících výsledný povrch. Algoritmus patří do skupiny funkcí označovaných jako splines, které plochu neprokládají skrze vstupní body, ale mezi vstupními body. Tato vlastnost znamená, že výsledná plocha nebude přesně kopírovat lokální maximum, ale díky tomu může vyrovnávat případné chyby vstupních údajů pocházejících z měřících stanic (viz 1.2). I této problematiky se týkají následující paragrafy. Velkou výhodou programu je jeho schopnost kontrolovat stabilitu výsledné křivky. Kontrola je prováděna výpočtem hodnot ve vstupních bodech a porovnáním s hodnotami původními.Je-li tato hodnota příliš vysoká, program výpočet dokončí, ale současně je schopen doporučit nejvhodnější změnu nastavení.
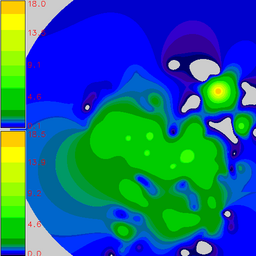
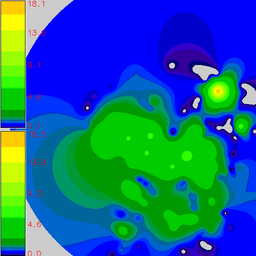
4.2.1.1 Změna vzhledu výsledného povrchu - smooth a tensionPro lepší představy vzniklé plochy a následky změn podmínek si lze výpočet připodobnit takto : Vstupní body nechť jsou pevně umístěny v prostoru, potom výsledná plocha vzniká naražením ocelového plátu na tyto body. Výsledný vzhled plochy je určen převážně dvěma parametry - smooth a tension. Parametr smooth popisuje spíše hladkost plochy, jeho hodnoty při originální představě vyjadřují ``tloušťku plechu''. Změna tohoto parametru proti implicitní hodnotě výsledky ovlivňovala negativně, proto byla tato hodnota ponechána. Parametr tension určuje vzhled nastavením vlastností popisujících napětí plochy. Jeho změnou se výsledný povrch pohybuje se od vzhledu odpovídající ``pružné membráně'' při nízkých hodnotách parametru až po vzhled odpovídající ``tenkému plechu'' při vysokých. Porovnání ukazují obrázky v tabulce 4.1 zobrazující výsledky změny parametru tension (hodnoty pochází ze dne 12.8.2002, hodinový výsledek 16-17 hodin, 107 měřících stanic) :
Tabulka č. 4.1: Algoritmus RST se změnami nastavení parametru tension Z příkladu je zřejmé, že při nižší hodnotě parametru tension (20,40) výsledná mapa vytváří mírně zvlněnou plochu a tak lépe vyrovnává případné lokální extrémy, ale ve vstupních bodech neodpovídá originálním hodnotám. Se vzrůstající hodnotou tohoto parametru se plocha přibližuje vstupním hodnotám, až je podle kategorií nerozlišitelná (80,120,...). Při stále vyšších hodnotách (240,320) dochází k nesprávnému zvýraznění lokálních extrémů na úkor zbytku plochy, která se rychle blíží k průměrným hodnotám.
4.2.1.2 Ovlivnění plochy výsledné mapy maskouVzhledem k tomu, že vstupní body jsou rozmístěny převážně ve východní oblasti, dochází k situaci, kdy interpolace nejvzdálenějších bodů - rozmístěných na západní straně - selhává. Proto je výpočet omezen maskou , která tyto oblasti neobsahuje.
4.2.2 Algoritmus Inverse Distance Weighted (IDW)Narozdíl od algoritmu RST (4.2.1), který se snaží nahradit vstupní sadu bodů trojrozměrnou křivkou procházející v okolí těchto bodů, tento algoritmus je založen na výpočtu hodnot jednotlivých buněk v matici rastru s použitím omezené množiny vstupních bodů. Interpolovaný povrch je váženým průměrem náhodně rozptýlených bodů a váha přiřazená jednotlivým bodům se zmenšuje podle vzdálenosti bodů. Díky této jednoduchosti je algoritmus velmi rychlý a zvýšení počtu vstupních bodů zpomalí výpočet pouze lineárně, navíc v takové situaci se výrazně zvyšuje kvalita výsledné plochy. Výsledný interpolovaný povrch navíc prochází vstupními body. Funkce zpracovává každou buňku ve výsledném rastru (v tomto případě 512×512 bodů) a pro jednotlivou danou buňku počítá interpolované hodnoty. Interpolovaná hodnota buňky je určena hodnotami nejbližších n vstupních bodů a vzdáleností buňky od těchto bodů.
4.2.3 Porovnání algoritmů RST a IDWAlgoritmy RST a IDW se výrazně liší způsobem výpočtu výsledné plochy a Tato rozdílnost pochopitelně vytváří také rozdíly ve výsledných datech. Cílem je proto nalezení takového způsobu propojení jejich výsledků, který by využil výhod obou. V tabulce 4.1 jsou proto uvedeny některé vybrané rozdíly mezi algoritmy.
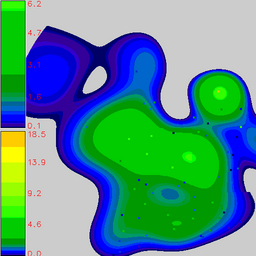
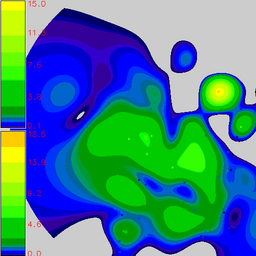
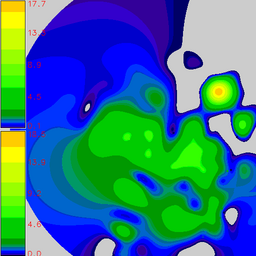
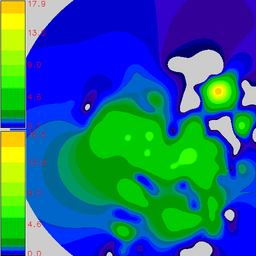
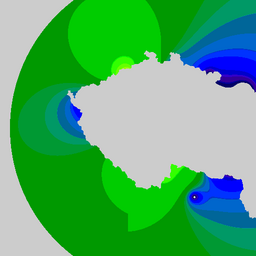
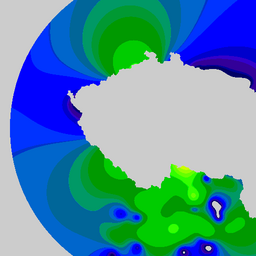
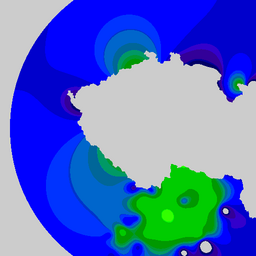
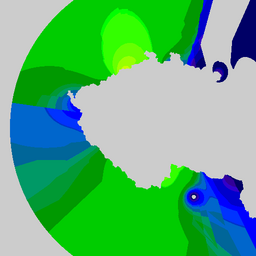
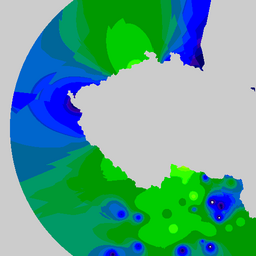
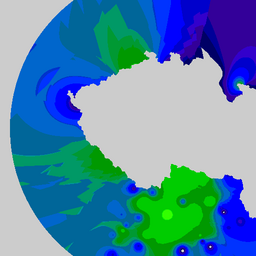
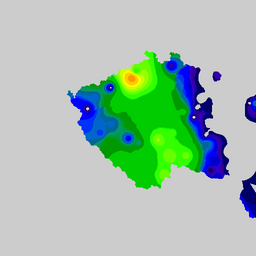
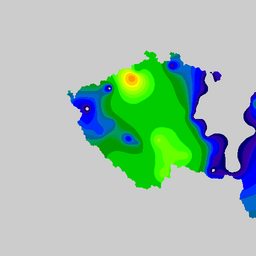
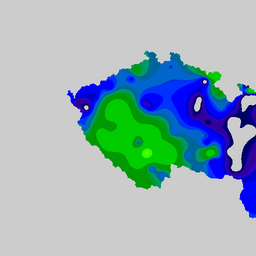
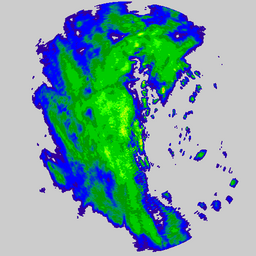
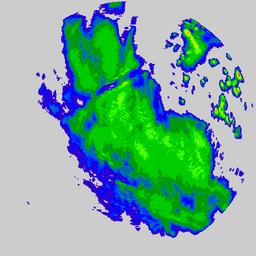
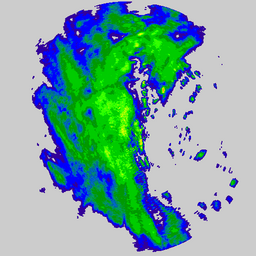
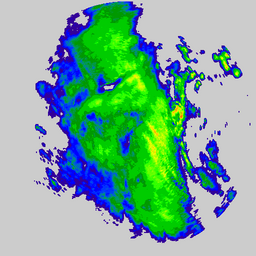
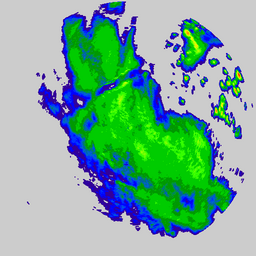
Tabulka 4.1: Srovnání algoritmů RST a IDW Jedním z faktů, které ale z těchto výsledků neplynou, je schopnost algoritmu RST mnohem lépe pokrývat oblast, ve které nejsou žádné měřící stanice, protože zatímco algoritmus IDW využívá pouze několika málo měřících stanic (konkrétně 24), algoritmus RST využije desítek stanic. Obrázky v tabulce 4.2 je možné porovnat výsledky obou interpolací u hodinových úhrnů ze tří po sobě jdoucích měření. Pro lepší znázornění byla z výsledné mapy odečtena plocha České republiky. Jak je z těchto obrázků zřejmé, v některých případech algoritmus IDW vytváří mapy nepřesné, v horším případě dokonce mapy nespojité.
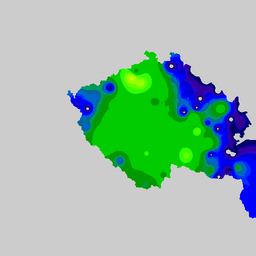
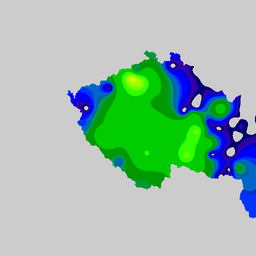
Tabulka č. 4.2: Srovnání algoritmů RST a IDW vně oblasti měřících stanic Naopak při zpracování výsledků v oblasti pokryté měřící sítí algoritmus IDW vytváří mapu, která přesně kopíruje vstupní hodnoty. Díky této skutečnosti je algoritmus výrazně použitelnější pro oblast pokrytou sítí měřících stanic a je schopen lépe vystihnout drobné lokální odchylky (vyšší nebo nižší srážkový úhrn). Podobně jako v předchozím případě se soustředíme pouze na určitou oblast, v tomto případě plochu České Republiky. Z přehledu obrázků v tabulce 4.3 vyplývá lepší schopnost algoritmu IDW popsat oblasti lokálních odchylek od průměru, a to nejen ve vrcholcích, ale i v místech s nulovými srážkami.
Tabulka č. 4.3: Srovnání algoritmů RST a IDW uvnitř oblasti měřících stanic 4.3 Adjustace radarových mapDalším krokem, který je potřeba provést před vytvořením cílových dat, je korektní nastavení mapy vzniklé metodou radarových odrazů. Radarová měření - oproti měření sítí meteorologických stanic - vytváří srážkovou mapu okamžitě bez nutnosti interpolace bodových dat. I přes velmi dokonalou technologii je radar mnohdy zatížen chybou s koeficientem 3-5 (viz 1.4.2), která brání přesné kalibraci map vytvořených radarem. Proto se používá takzvaná adjustace radarových map, při které jsou hodnoty bodů v mapě vynásobeny konstantou spočítanou porovnáním hodnot map vytvořených interpolací měřících stanic proti hodnotám vzniklých radarovým měřením. Postup je komplikován dvěma hlavními problémy :
Tabulka č. 4.4: Srovnání adjustace z ČHMÚ (ř.1) a vytvořené GRASSem (ř.2) Adjustaci radarových měření provádí současně také ČHMÚ, kde je kromě jiného způsobu výpočtu adjustace použita i jiná metoda výpočtu. Jak je zřejmé i z grafické prezentace obrázků v tabulce 4.4 jde o velmi podobné výsledek, protože odchylka je v porovnání s chybami vstupních dat (i řádovými) takřka zanedbatelně malá. Vzhledem k použití interpolací nelze určit, který výsledek je přesnější, zda původní pocházející z ČHMÚ, nebo vypočítaný použitím GRASSu. 4.4 Propojení mapových vrstevDůvodem pro integraci mapových vrstev jsou rozdíly v kvalitě zpracování jednotlivých oblastí původních mapových vrstev, které brání nalézt nejlepší mapovou vrstvu (např. 4.2.3). Proto se snažíme nalézt takové spojení originálních vrstev, které využije jejich výhody a kvality a potlačí nevýhody a chyby. Jak je zřejmé například z 4.2.3, kvality vrstev se mohou lišit podle určitých oblastí. Proto je třeba mapu rozdělit a určit různé poměry použitých vrstev podle takto vzniklých území. Přitom se vytváří problém přechodových oblastí, ve kterých je třeba navázat plochy vzniklé různými metodami. Vyřešit propojení dvou rozdílných oblastí současně znamená testování různých nastavení v sousedních oblastech a určitá omezení na použité mapové vrstvy.
4.4.1 Integrace RST+IDW, stanice+radarPro spojení výsledků interpolací meteorologických stanic byla mapa byla rozdělena na dvě oblasti - oblast měřících stanic a oblast mimo měřící stanice. Důvodem tohoto způsobu rozdělení je různá kvalita výsledků interpolačních metod právě v těchto územích. Testováním byly vybrány jako nejvhodnější koeficienty (v poměru RST:IDW) pro vnitřní oblast 1:2 a pro vnější oblast 3:2. Při spojení výsledků měřících stanic a radaru bylo testováním určeno opět rozdělit mapy podle oblasti, kterou pokrývají měřící stanice. Důvodem byla skutečnost, že mimo tuto oblast dávají i spojené interpolační metody velmi odlišné výsledky a jejich použití je velmi omezené, naopak uvnitř této oblasti je jejich použití přesnější. Proto byly tyto koeficienty nastaveny (v poměru radar:stanice) pro vnitřní oblast 1:2 a pro vnější oblast 5:1. 4.5 Analýzy mapV projektu je kromě analýz nutných pro zpracování některých dat (adjustace radarových měření - 4.3) použita pouze jedna významná analýza a to při výpočtu procentuálního přehledu vybraného výřezu. 4.6 Export mapV této sekci popíšeme jednak obecné principy exportu map, jednak způsob specifický pro tvorbu PNG map z GRASSu. Poslední části uvádí příklady tohoto postupu.
4.6.1 Základní způsob tvorby mapPrvním krokem tvorby map je jejich export z GRASSu do systémového prostředí. Nejjednodušším způsobem exportu je použití funkcí typu .out. a následný převod do cílového tvaru (například použitím unixového programu convert). Pro následný převod na rozhraní WWW přichází v úvahu tyto tři výstupní formáty : GIF, JPEG a PNG . Pro účely tohoto projektu byl vybrán formát PNG.
4.6.2 Tvorba map ve formátu PNG použitím grafického monitoruSystém GRASS umožňuje i výrazně efektivnější způsob exportu map. Je jím použití virtuálního grafického monitoru. Tento monitor funguje podobně jako standartní monitor, ale místo zobrazování na obrazovku počítače vytváří virtuální obraz, který je po uzavření uložen do definovaného souboru. Tento princip lze naznačit ve třech krocích :
Zvláště poslední výhoda je důležitá pro vhodnou prezentaci. Díky této možnosti totiž lze do jedné mapy současně zaznamenat více informací a v rámci exportu například zobrazit mapu, do ní zakreslit obrysy hranic (států, povodí, ...) a nakonec doplnit legendu s popisem prezentace hodnot v mapě. RaMSES - implementaceKoncovou fází této práce je realizace vlastního projektu. Kapitola je rozdělena na několik sekcí, které navazují na jednotlivé problémy nastíněné v kapitole 3 :
5.1 Vstupní podmínkyPro účely implementace a testování systému byla použita data z jednoho vybraného dne. Datum 12.8.2002 - den nejvyšší srážkové aktivity v době povodní v létě roku 2002 - bylo vybráno z několika základních důvodů :
5.2 PrezentacePopíšeme konkrétní prezentaci jednotlivých kroků Funkční analýzy uvedené v Návrhu (3.2) a schopnosti jednotlivých stavů aplikace. Ukázky lze nalézt na přiloženém CD-ROM.
5.2.1 Stručný náhled mapObrázek č. 5.1: Stručný náhled map
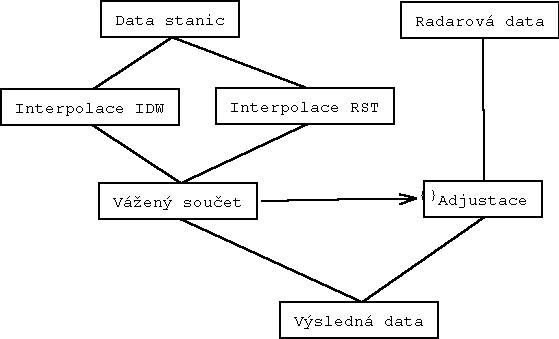
5.2.2 Velká mapa a podrobný výřezObrázek č. 5.2: Velká mapa Obrázek č. 5.3: Podrobný výřez Obrázek č. 5.4: Přehled vzniku výsledných dat ZávěrJak je ukázáno v textu, výsledky práce potvrzují správnost volby technologií i postupů při vývoji aplikace. Vývoj a testování systému probíhalo na datech ze dne 12.8.2002. Hodnoty z tohoto data - dne nejvyšší srážkové aktivity v době povodní v létě roku 2002 - poskytují optimální podmínky pro testování. Důležitým prvkem práce je i srovnání výsledků s výstupy vytvořenými stávajícími metodami v rámci výzkumů ČHMÚ bez využití nástrojů systému GRASS. Testování ukázalo, že výsledky jsou výborně korespondují a není vyloučeno vyšší přiblížení reálným hodnotám využitím opravných metod a kombinovaných výpočtů. Použité technologie navíc zajistily několikanásobné zrychlení některých kroků. Současně se očekává, že systém bude nasazen v ČHMÚ. Při tvorbě systému byl kladen důraz na jeho modularitu, díky které lze systém rozšiřovat o další komponenty určené pro zpracování jiných environmentálních oblastí. Příkladem takového rozšířením může být modul pro zpracování povětrnostních podmínek nebo odhad šíření znečištění vodním tokem. Jiným zajímavým směrem pro rozšíření produktu, je počítání změny stavu hladiny spodní vody. Této schopnosti můžeme dosáhnout doplněním datové vrstvy o hydrologická data aktuálních průtoků na řekách a vrstvy vyjadřující odpařování vody. Díky takto vypočítaným hodnotám lze současně kontrolovat jak schopnost krajiny přijímat srážky bez rizika povodní, tak eliminovat situace vzniklé kritickým úbytkem spodní vody. Texty
Literatura
|
|
Copyright (C) VŠB - TU Ostrava,
Institut geoinformatiky, 2001-3. Všechna práva vyhrazena. |